
Komplekse bevægelser
kan du programmere med simple kommandoer
Idéen bag TRIO's Motion kommando/instruktioner er, at forenkle komplekse bevægelser med simple og lette kommandoer. Med TRIO's controllere kan du dermed lave alle tænkelige bevægelser og synkroniseringer hurtigere og enklere end i andre systemer.
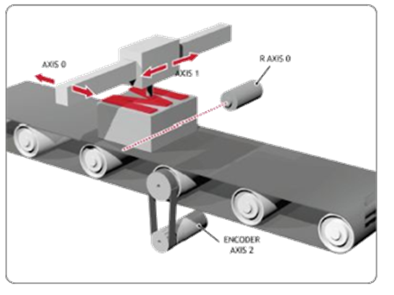
ADDAX (base og akse)
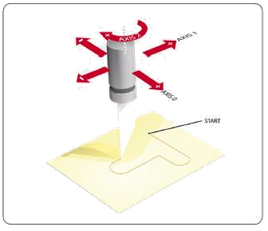
Kommandoen ADDAX summerer to bevægelser sammen til én. Det er vist her på illustrationen, hvor AXIS 0 er en synkron medfølgebevægelse til båndet samtidig med, at den også anvendes i en interpolerende bevægelse med AXIS 1 for at lave bogstavet under bevægelsen.
Du kan meget let tilføje akser med en TRIO controller
ADDAX er en meget simpel funktion, hvormed du kan samle 2 eller flere bevægelser til én fysisk akse.
ADDAX bruges ofte, når f.eks. gearing eller CAMBOX-bevægelse skal korrigeres til en ny position. Det kan være ud fra et registermærke eller en index-puls på en enkoder osv.
ADDAX kan du bruge til at sammensætte meget komplekse bevægelser; Kun fantasien sætter grænsen.
Vi har anvendt ADDAX i flere projekter
Korrektion af roterende stans i forhold til registermærke:
Stansen kører synkront i forhold til en bane, hvorefter en virtuel akse er ADDAX’et til stansen. Selve korrektionen udføres på den virtuelle akse, hvilket medfører at stansen får den overlejrede korrektion lagt ovenpå den synkrone bevægelse.
Dekorering af kage produkter:
Hvor en række kager flyvende skal dekoreres med et hjerte eller lignende. Et XY-system udfører dekorering. X-aksen skal samtidig køre synkroniseret med en bane. Her benytter du en ADDAX fra X-delen på dekoreringen til aksen, der laver ”følge-med-bevægelsen”.
Medfølgende bevægelser under påføring af lim:
Samme princip som dekorering.
Video: Demonstration of Trio's Motion Perfect v4.2 software scope and 3D visualization tools. Also showing the new RPS (Robot Programming System).
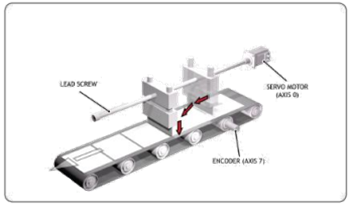
MOVELINK
MOVELINK: Syncdistance, masterdistance, acceleration, master og akse.
Kommandoen MOVELINK udføres på simpel vis med en synkronisering over en specifik afstand. Master og slave bliver linket sammen i en bestemt position og forbliver derved synkrone.
Som vist her, hvor AXIS-0 bevæger en klippe-enhed så den udfører et fly-vende klip. Kniven accelereres altid over den samme distance på masteren. Herved sikres høj præcision uafhængig af masterbåndets hastighed.
MOVELINK er en meget enkel metode til at generere en flyvende-klip-funktion. Du angiver blot masterdistance og tilhørende slavedistance samt acc., dec. samt distance på slaven.
Så sørger MOVELINK for, at hele bevægelsen kører korrekt, også ved varierende hastigheder på masteren.
Alle systemer kan lave MOVELINK til f.eks. flyvende klip, men udfordringerne starter først når:
Synkronisering mellem master og slave er 100% korrekt (skal de altid være), også når masterhastigheden ændres mens slaven accelereres op til synkron hastighed. Dette sker helt automatisk.
• Man ønsker at fortsætte ”hvor vi slap”, efter låsekreds eller nødstop.
• Ved genindkobling skal man sikre, at alle akser står i forhold til masteren, før man kan fortsætte afviklingen af den aktuelle MOVELINK.
• Man ønsker at kombinere flere MOVELINK bevægelser efter hinanden eller lave en MOVELINK, som repeteres uendeligt. (simplificeret CAM bus, hvor man ikke behøver at generere en tabel med punkter).
Vi kommer nemt og hurtigt igennem ovenstående problemstillinger, af årsager:
Vore 40 år lange erfaring med servoteknik og sammensæt-ningen af de systemer og styringer vi anvender. Vi har funktioner der løser komplekse bevægelser med simple kommandoer og er udviklet til motion opgaver af folk, der har erfaring med motion.
Vi har anvendt MOVELINK i flere projekter, der alle indeholder ovenstående udfordringer:
• Dispensering af etiketter, der skal sættes på en kontinuerlig kørende folie til en bedste position. Med MOVELINK sikres at lablen ikke krøller under påsætning. Der kompenseres løbende for ændringer i etiketlængde, da afstanden mellem pasmærker måles og medfører evt. korrektioner til MOVELINK kommandoen.
• Flyvende fyldning af pasta og opskæring af kød. Med MOVELINK fås en øget fleksibilitet til at ændre fylde-længde eller mængden.
• Opspoling af produkter, hvor viklearmens position styres i forhold til lag og afstand på valsen.
• Alle typer af synkron bevægelser i pakkemaskiner.
• Roterende klip af produkt materiale til medico produktion.
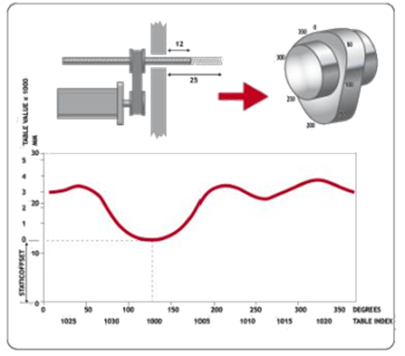
CAMBOX
CAMBOX ( tabel_start, tabel_slut, link_distance, master, optioner og akse)
Kommandoen CAMBOX udfører på simpel vis en varierende synkronisering over en specificeret distance på masteren.
CAMBOX er den elektriske CAM-skive, hvor alle CAM-data ligger i en tabel, som du nemt kan ændre og dermed opnår du forøget fleksibilitet.
Alle systemer kan lave en CAM-tabel, men udfordringerne starter først når:
• Man ønsker at fortsætte ”hvor vi slap” efter låsekreds eller nødstop. Ved genindkobling, skal man sikre, at alle akser står korrekt i forhold til masteren, før man kan fortsætte afviklingen af den aktuelle CAMBOX.
• Hvor på tabellen skal slaven i indgreb? - Det er ofte ønsket at indkoble forskellige steder i CAMBOX'en.
• Flyvende beregning af en CAM-tabel. Det er ofte ønskeligt at kunne genberegne en CAMBOX og derefter anvende denne uden stop eller spring i kørslen.
• Hvis data bliver generet til CAMBOXen samtidig med at CAMBOXEN afvikles. En nødvendighed hvis kørselen skal starte for alle data er tilgængelige.
Vi har anvendt CAMBOX til flere projekter, der alle indeholder ovenstående udfordringer:
• Flyvende opskæring af kød, hvor der veksles mellem flere CAM-tabeller – Én bliver bearbejdet og én beregnet.
• Synkrone cirkulære bevægelser i forhold til en kørende dorn – Til produktionsmateriale til gulvvarme.
• Systemer til udstansning af produkter fra en løbende kørende produktbane, hvor værktøjet skal synkroniseres og passere med det rigtige indeks i produktbanen
• Udstødning af chokolade i en form, hvor mængden af chokolade og creme skal passe i forhold til højde-positionen af støberen
• Opskæring af laks for udrensning af maveindholdet. Laksens bug-højde måles i forhold til længden. Alle data anvendes i CAM-tabellen for at afvikle en kørselsprofil, der følger bugen på fisken.
Vi kommer nemt og hurtigt igennem ovenstående problemstillinger, af årsager:
Vore over 40 år lange erfaring med servoteknik • Sammensætningen af de systemer og styringer vi anvender • Vi har funktioner, der løser komplekse bevægelser med simple kommandoer og som er udviklet til motionsopgaver af folk, der har erfaring med motion.
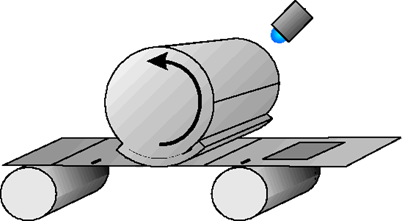
Eksempel på anvendelse af FLEXLINK
Udstansning af etiketter
En kniv-valse kører synkront med foliebanen. For hver omgang, mens kniven er fri af folien, skal valsen avancere en konstant distance således, at afstanden mellem klip på folien bliver korrekt. Dette kan du lave simpelt med FLEXLINK, hvor ganske få parametre skal angives for at få den ønskede profil.
Det er meget enkelt at rette i parametrene ”On the fly”. I de fleste andre systemer skal en sådan funktion udføres med en CAM, hvor den samlede profil skal beregnes og lagres i en tabel.
Simplere og enklere end en CAM-table
• Udregner selv den korrigerede bevægelse for at nå rund til næste klip
• Forenkler den øvrige programmering af bevægelsen
• I kombination med "ADDAX" korrigeres i forhold til pasmærke
• FLEXLINK er ikke scantids-belastende og kræver ingen CPU-ressource
Vi har anvendt FLEXLINK
i flere projekter, der alle blev løst let og enkelt
• Flyvende perforering og svejsning af plastic poser. Bevægelse udføres i forhold til
en konstant kørende posebane.
• Udstandsning af etiketter med en roterende kniv.
• I flyvende klip applikationer, hvor klippet er kortere end knivens omkreds – her
simplificerer FlexLink beregningerne af bevægelsen.
MOVECIRKEL
MOVE (x ,y) og MOVECIRKEL er simple kommandoer til at lave lineær- og cirkulær interpolation.
Med disse kommandoer kan en kniv følge et bestemt mønster samtidig med, at den holder som tangent til bevægelsen. Hastighed og acceleration af de enkelte akser er styret som en vektorhastighed.
Vi har anvendt MOVECIRCLE, cirkulær og interpolerende bevægelser i flere projekter
• Slibning af glas – Skal kunne køre cirkulære bevægelser rundt om hjørnerne samtidig med at sliberen holdes tangent til bevægelsesretningen.
• Limning af alle mulige former.
• Udskæring af glasfiber til produktion af vindmølle vinger.
Vi kommer nemt og hurtigt igennem ovenstående problemstillinger
• Vor mere end 40 år lang erfaring med servoteknik.
Sammensætningen af de systemer og styringer vi anvender har funktioner, der løser komplekse bevægelser med simple kommandoer og er udviklet til motionsopgaver af folk, der har erfaring med motion.
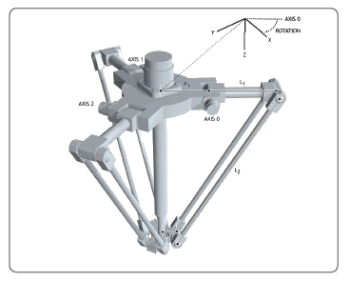
Koordinat transformation
Er en integreret funktion i TRIO controlleren. Således kan alle robot-geometrier konverteres til standardbevægelser, der kan udføres med kommandoer som:
MOVE (x ,y) og MOVECIRKEL for cirkulær og lineær interpolation.
MOVELINK til lav conveyor tracking.
Vi har anvendt Koordinat Transformation i flere projekter
Når kinematikken af det mekaniske system ikke blot kan løses med standard XY-koordinatsystemer stilles der krav til en controller, der på enkelt vis kan konvertere kinematikken, således at du kan anvende simple kommandoer.
2-akset SCARA robot til materialehåndtering – Med TRIO ”FRAME” programmeres alle positioner og bevægelser i X,Y koordinater. Al konvertering til vinkler udføres automatisk, f.eks. værktøjspunkt kompensering i håndteringsopgaver.
PSWITCH
PSWITCH (output, on_pos, off_pos, optioner) er en positionsafhængig udgang. Hermed kan det digitale output sættes i forhold til positionen på servoaksen. Denne funktion belastes ikke af skantiden, hvilket gør at udgangen sættes med en præcision på 0,1 µ Sek.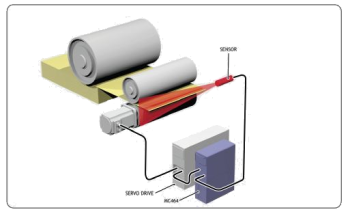
Vi har anvendt PSWITCH i flere projekter,
der alle indeholder ovenstående udfordringer
• Water-Jet cut af flyvende opskæring af kød, hvor vandstråle-kniven skal aktiveres
eller aktiveres i forhold til positionen.
• Udsortering af produkter i forhold til deres stilling i et skifteregistrering med op til
600 emner/min.
• Trigger-signal til Vision, således at vision-systemet tager billeder ved den rigtige
position af produktet.