
Vision guidet opskæring af Laks
og så foregår det under flyvende bevægelse
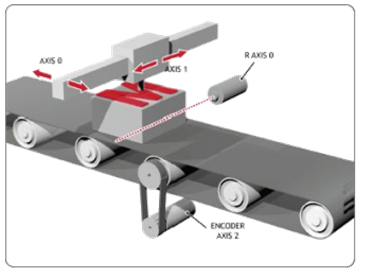
Delta Elektronik A/S har udviklet softwaren til en maskine, som automatisk trimmer konturen af en laks. Dette er gjort i samarbejde med maskinproducenten og en leverandør af vision systemer. Maskinen har 8 synkroniserede servo akser og 50 motion relaterede I/O, som alt sammen er styret og synkroniseret af en TRIO motion controller. Der er kommunikation via Ethernet ModbusTCP til vision system.


Laksens kontur skal løbende opmåles og data lagres i forhold til længden af fisken. Vision systemet detekterer fedtkanten af fisken og optager XY koordinaterne sammenholdt med positionen på fremførings båndet.
Alle vision koordinaterne sendes til servo systemet, som laver bevægelse for at skære fedtkanten af, i forhold til fiskens kontur. Dette udføres synkron til fremførings båndet.
Laksens kontur skal løbende opmåles, og data lagres i forhold til længden af fisken.
Vision systemet detekterer fedtkanten af fisken og optager XY koordinaterne sammenholdt med positionen på fremførings båndet.
Alle vision koordinaterne sendes til servo-systemet, som laver bevægelse for at skære fedtkanten af, i forhold til fiskens kontur. Dette udføres synkront med fremførings båndet.
Video: LinMot Linear Motors in Fish Vaccination.
Flere fisk efter hinanden i skifte registre
Samtidig med at en fisk bliver bearbejdet, skanner vision den næste fisk, og Motion controlleren beregner CAMBOX til næste fisk. Da der er en vis afstand mellem knive og vision lagres alle data i et skifteregister.
I den aktuelle maskine kan der ligge op til 3 ”fiske-data” i et skifteregister. Dette kan dog udvides efter behov.
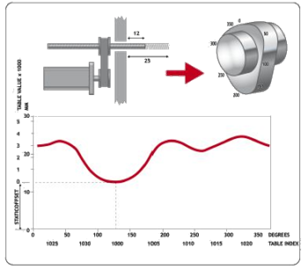
Opgaven krævede dynamisk arbejdende servo akser for at opnå den ønskede produktions kapacitet og præcision. Selve motion delen blev løst ved kombination af avancerede motion funktioner: Positions data opsamlet af vision, bruges til at beregne en CAMBOX for 2 akser; en lineær som kører ”ind/ud” i forhold til fisken, og en roterende akse, som holder kniven i korrekt vinkel i forhold til fisken.
De 2 beregnede CAMBOX afvikles derefter i forhold til fremførings båndet.
En styrings løsning som i en controller håndterer logikken og den komplette motion funktion. Styringen kan re-konfigureres eller opdateres via et SD flashkort uden anvendelse af en PC.
Alle system- og maskine parametre er indeholdt i controlleren.
Hvis en udskiftning af et servodrev skulle blive tilfældet, kan et nyt drev direkte erstatte et defekt og få overført alle relevante parametre via Ethernet bussen.
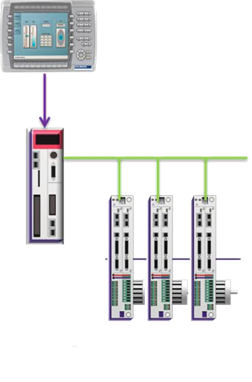
Hele styringen, som vist, kan foregå online via en VPN forblindelse.
- 3 x 4 kVA servodrev
- STO input
- EtherCAT eller SERCOS III
- Fælles DC-bus
Relaterede produkter