
SCON-CA controller
med Anti-Vibration funktion – for lineær servo aktuator
Der er to typer SCON-controllere: En type med standardspecifikationer, hvor operationer udføres via PIO- eller pulstog input og en type med netværks-specifikationer til drift via forbindelse til et field-netværk.
Inkrementelle og absolutte specifikationer er tilgængelige for begge typer. Imidlertid er der kun trinvise specificerede operationer, der er tilgængelige, når de kører via pulstog-input.
IAI har udviklet en 1-akset controller-serie med særlige egenskaber - SCON er en af dem.
ACON positions controller er især egnet til aktuatorer type: RCA, RCA2, RCD og RCL.
DCON-CA positions controller er designet til aktuator type: RCD microcylinder op til 512 positioner.
PCON controlleren understøtter flere field-netværk m høj hastighed og Big-Data kommunikation.
SCON Modes
• Positionering-, Teaching- og
Magnetventil mode
• Pulse train mode
• DeviceNet tilslutning specifikationer
• CC-Link tilslutning specifikationer
• Kompatible enkoder: Incremental og
absolut
• Positionering punkter: 512

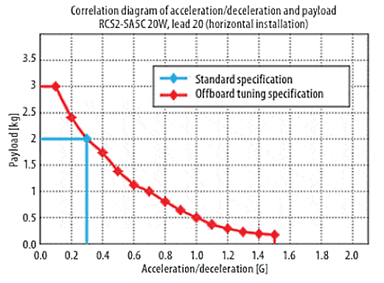
Forøgelse af aktuatorens belastningskapacitet
Offboard tuning er en standard funktion til at øge accelerationen / decelerationen, når belastningen er lille. Eller reducere accelerationen / decelerationen, når belastningen er stor. Det betyder så at aktuatoren er indstillet til at fungere optimalt for den givne belastning.
Video viser dig, hvordan du opsætter IAI's SCON-CA Controller for Pulse Driver-funktion med ROBO-cylinder ved hjælp af RCPC-software.
Understøtter flere field-netværk
Dennen valgfrie funktion giver direkte forbindelse til DeviceNet, CC-Link (*1) og PROFIBUS-DP, men også til MECHATROLINK, CompoNet, EtherCAT og EtherNet/IP. Aktuatoren kan også betjenes ved at specificere koordinatværdier og det kan ske direkte via et af de nævnte field-netværk.
(*1) CC-Link blev ændret fra Remote I/O til remote-enhed.

![]()

![]()
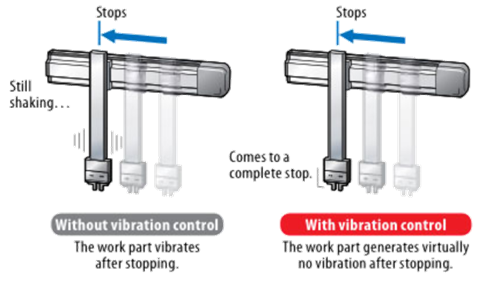
Vibrationsstyring
Vibrationsstyring er en standardfunktion som er tilføjet og den undertrykker vibrationer af arbejdsdelen som er installeret på slideren, når aktuatorens slider bevæger sig.
Funktionen forkorter den tid, hvor aktuatoren venter på at vibrationen forsvinder. Dette medfører som følge deraf en forkortelse af cyklustiden.
Tvangsstyring og vedligeholdelse
For aktuatoren er det en valgfri funktion og i controlleren er det en standard funktion. Aktuatoren type RCS2-RA13R leveres med en styringskontrolfunktion. Dette giver mulighed for nøjagtig push-motion ved at fremføre skubkraften ved hjælp af den dedikerede belastnings celle monteret på aktuatoren.
Vedligeholdelsesplan baseret på det samlede antal bevægelser og tilbagelagt afstand
Det samlede antal aktuator bevægelser og den samlede kørte afstand beregnes og registreres i controlleren. Når det forudbestemte antal eller afstand overskrides, udsendes et signal til en ekstern enhed. Du kan bruge denne standardfunktion til at kontrollere, hvornår aktuatoren skal smøres eller periodisk inspiceres.
Kallender funktion er standard
En oversigt over alle genererede alarmer opbevares med kalenderfunktionen. En urfunktion er tilføjet for at lette analysen af alarmerne, fordi tidspunktet og datoen for hver alarm, der er opstået, nu vises på skærmen med alarmhistorik. Tids- og dato-oplysningerne opbevares i 10 dage.
SCON Controller til RCS2 aktuator serie
SCON type C er en positions controller til aktuator ROBO Cylinder® RCS2-serien. Controlleren har forskellige kontrolfunktioner som kombineres i en enkelt enhed.
Der er to typer SCON-controllere: En type med standardspecifikationer, hvor operationer udføres via PIO- eller pulstog input og en type med netværks-specifikationer til drift via forbindelse til et field-netværk.
Inkrementelle og absolutte specifikationer er tilgængelige for begge typer. Imidlertid er der kun trinvise specificerede operationer, der er tilgængelige, når de kører via pulstog-input.