
5 akset chokolade støber
Dosering af chokolade og creme - synkroniseret med dysens bevægelse
Delta Elektronik har udviklet, softwaren til en chokolade støber, der automatisk styrer udsprøjtningen af chokolade og creme, således at det bliver til et færdigt produkt i én cyklus.
Maskinen har 5 synkroniserede servo akser og 32 motion relaterede I/O, der alt sammen er styret og synkroniseret af en TRIO motion controller.


Det vigtige som slutkunden ser på, er fordelingen mellem chokolade og creme. De fleste producenter på markedet kan støbe produkterne med 40 % chokolade og 60 % creme.
Da chokoladen er en meget dyr ingrediens ønsker slutkunden et resultat med så lidt chokolade som muligt som f.eks. 30 % / 70 % eller endda 20 % / 80 % afhængig af støbeformens facon. Dette stiller store krav til en nøjagtig dosering af chokolade og creme i et forhold til dyssens position, når den er nede i formen.
Maskinen skal støbe et færdigt chokolade produkt, der består af en chokoladeskal udvendig en karamelcreme indvendig.
Selve støbeprocessen udføres nede i en form, der ligger på hovedet.
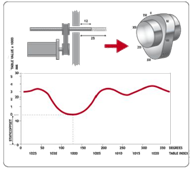
Den største udfordring ligger i at udregne en CAM tabel i forhold til data fra den indtastede recept.
Opgaven krævede dynamisk arbejdende servo akser for at opnå den ønskede produktions kapacitet og præcision. Selve motion-delen blev løst med kombination af avancerede motion-funktioner:
Denne CAM-box afvikles i forhold til dysens position således at mængden af udstøbningen kan varieres i forhold til dysens højde og position.
En styrings løsning som i en controller håndterer logikken og den komplette motion funktion. Styringen kan re-konfigureres eller opdateres via et SD flashkort uden anvendelse af en PC.
Alle system- og maskine parametre er indeholdt i controlleren.
Hvis en udskiftning af et servodrev skulle blive tilfældet, kan et nyt drev direkte erstatte et defekt og få overført alle relevante parametre via Ethernet bussen.
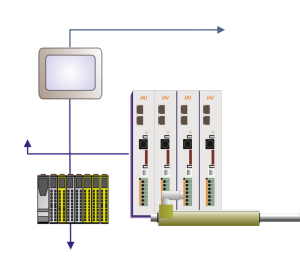
Hele styringen kan tilgås online via en VPN forblindelse.
- 3 x 4 kVA servodrev
- STO input
- EtherCAT eller SERCOS III
- Fælles DC-bus
Relaterede produkter