
IK-P6 Kombinations system
Du kan få X/Y akse, Y/Z akse eller X/Y/Z akse system fra IAI
IAI's Cartesian RoboCylindere er baseret på RCP6-serien en generation af lineære systemer. Ligesom dem har disse kartesiske robotter også højopløselige, batterifri absolutte enkodere og har derfor de samme fordele: Du får ikke behov for reference kørsler, home-return sensor, der er ikke behov for batterivedligeholdelse og udskiftning, problemfrit genstart efter et nødstop og meget mere.
2-/3-akse kombinationer med høj opløsning, uden batteri og absolut enkoder. Kartesiske RoboCylindre har aldrig været mere overkommelige.
IAI har som standard designet RoboCylinder IK serien med absolut enkoder og uden behov for batteri. Dette hjælper med til at reducere antal trin i både design og montage. Serien er desuden designet til at kunne udføre endnu højere hastigheder sammenlignet med konventionelle modeller.
Kartesisk system
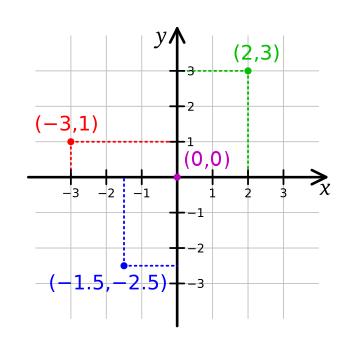
Et kartesisk koordinatsystem er en type af koordinatsystem, som har et retvinklet koordinatsystem. Dermed forstås at alle punkter i koordinatsystemet opfattes som en skæring mellem linjer der er parralle med akserne. Herved opstår der en ret vinkel mellem disse linjer, som det ses på billedet herunder. Det har navn efter René Descartes.
Det retvinklede koordinatsystem er det mest udbredte i praktiske sammenhænge, da det er det lettest tilgængelige og mest intuitivt forståelige. Afhængig af sammenhængen bruges det enten i to, tre eller flere dimensioner. Og altså her i et motion system.
Illustration af Koordinatsystemet:
Princippet i et kartesisk (Cartesian) koordinat-system vist th. med fire forskellige punkter og deres tilhørende koordinatsæt.
Video med IAI CT4 High-speed kartesisk robot.
1. Høj hastighed & høj acceleration/deceleration
Forkort dit udstyrs cyklustid ved at køre med den maksimale hastighed på 2500 mm/s og maksimal acceleration på 3,2 G. Standardcyklustiden er 32 % mindre end en konventionel kartesisk robot.
2. Høj stivhed, lav vibration
Den nyudviklede dedikerede støbte aluminiumsramme sikrer høj stivhed. Desuden reducerede den forbedrede form og vibrationsdæmpende ydeevne af fastgørelsesbeslagene til XY-akser vibrationen ved spidsen af Z-aksen, mens vibrationskontrolfunktionen i XSEL-controlleren opnåede væsentlig reduktion af vibrationer under højhastighedsdrift.
3. Effektivt driftsområde
Et bredt driftsområde på 400 mm (X-akse) x 300 mm (Y-akse) er sikret. Firkantede operationsområder har ingen spildplads og er mere effektive sammenlignet med multi-ledde robotter og parallel-link robotter, der kun kan arbejde i cirkler på grund af deres struktur.
4. Straight Moving Performance
Den højhastigheds-cartesiske robot kombinerer enkelt-akse robotter, der hver udfører lineær bevægelse, for at demonstrere fremragende lige bevægelighed.
Forskellige kombinationer
De mulige kombinationer er i høj grad blevet udvidet sammenlignet med konventionelle modeller og det medfører, at man får en ideel mulighed for at vælge lige nøjagtig den type som der er behov for, idet der findes 396 optioner.

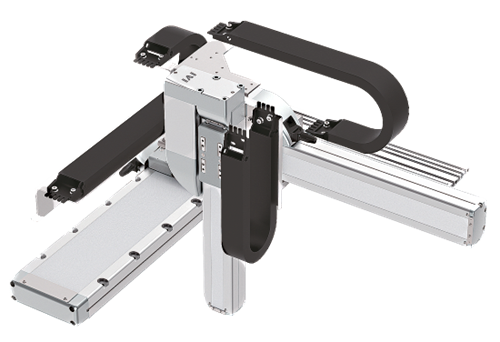
2-akse kombination: X-/Y-akse
Der er endda 7.056 optioner, hvis man tager valgmulighederne for kabelbaner med. Herudover er der tilføjet nye konfigurations typer med RCP6’s brede slider WSA-typer.
Kombinationer:
SA8 + SA7
SA7 + SA6
SA6 + SA4
WSA16 + SA8
WSA14 + SA7
Type SA er smalle slider og type WSA er bred slider.
2-akse kombination: Y-/Z-akse
Basis konfigurations type, hvor Y-aksens basis er fastgjort X-akse slider. Den betjenes af fastgørelses udstyr eller en Z-akse på Y-aksens slider.
Kombinationer:
SA8 + SA7
SA7 + SA6
SA6 + SA4
Type SA er en smal slider.
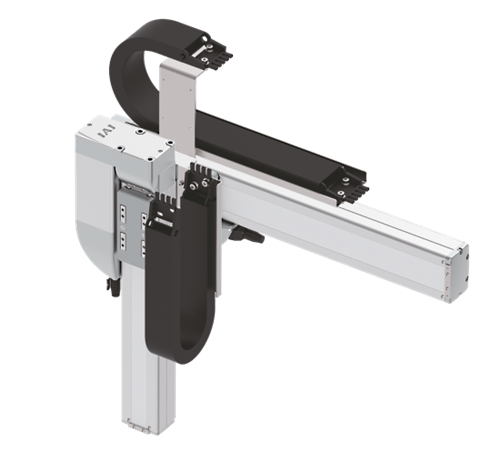
På disse typer er Z-aksens basis (lodret) fastgjort på Y-aksens slider med Y-aksen sidemonteret. Z-akse slider bevæger sig lodret, med mulighed for montering af jigs eller chucks til transport, hæve eller sænke arbejds emnet.
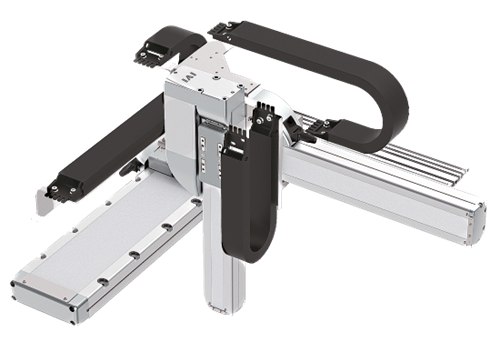
3-akse kombination: X-/Y-/Z-akse
Kombinationer:
SA8 + SA7 + SA6
SA7 + SA6 + SA4
WSA16 + SA8 + SA7
WSA14 + SA7 + SA6
Type SA er smalle slider og type WSA er bred slider.
Standard typer
Høj opløsning, batterifri med absolut enkoder. Alle akse-konfigurationer er udført med høj opløsning, ingen batteri og med absolut enkoder. Så derfor er der ingen batteri vedligeholdelse og Homing operationer er ikke et krav ved start-stop eller efter et nødstop eller fejlfunktion. Dette formindsker operationstiden betydeligt og det resulterer i reducerede produktions omkostninger. Desuden er den besværlige fremstilling af home-return programmer er ikke nødvendig også selv om der opstår et stop inde i en kompleks maskine.
Fordele ved brug af absolut enkoder:
- Med en absolut enkoder kræves ikke Home retur
- Home sensor er der ikke behov for
- Man skal ikke fjerne arbejdsemner efter et nødstop
Fordele uden batteri:
- Man sparer vedligeholdelse af batteri
- Pladsbesparelser, som kan bruges til andre formål
Højere hastigheder
IK-P6 serien er kompatibel med PowerCon controller, som er designet med en driver der har et høj-output. Den maksimale hastighed er blevet øget ved at benytte PowerCon controlleren. Dette kan reducere cyklustiden mærkbart og dermed hjælpe til at forbedre produktiviteten.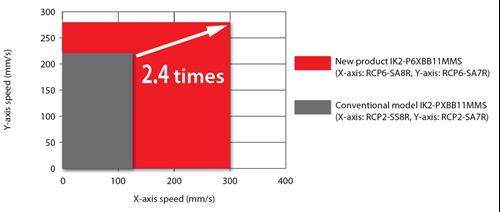
Rødt felt:
Nyt produkt IK2-P6XBB11MMS (X-akse: RCP6-SA8R, Y-akse: RP2-SA7R)
Gråt flet:
Konventionelt produkt: IK2-PXBB11MMS (X-akse: RCP2-SS8R, Y-akse: RCP2-SA7R)
Katalog og data