
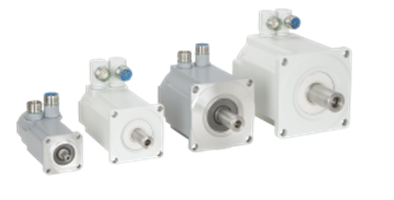
AKD drev serien med ProfiNET og EtherNET/IP
standard servodrev med integreret motion-controller og PLC
Styringsmæssigt kan en opgave være simpel, men selve dynamikken i opgaven kan hurtigt stille krav til servosystemet. Derfor kan du anvende AKD-seriens dynamiske servoakser med ProfiNET, EtherNET IP eller CANopen med integration til de fleste PLC-systemer.
![]()

AKD- og PDMM-serien – 3 i et servodrev: PDMM-serien er et standard AKD-servodrev med integreret motion controller og PLC. Anvend PDMM-serien som maskinstyring og opnåelse og forenklet styringskoncept med reducerede omkostninger.

EtherCAT drev serie
Med AKD-serien for EtherCAT kan Kollmorgens drev anvendes til alle EtherCAT baserede PLC-systemer og motion controllere. Med TRIO motion controllere MC 464 og AKD-serien kan de mest komplekse og dynamiske servosystemer realiseres, meget hurtigt og meget enkelt.
Fra standard motor til motor i rustfri stål:

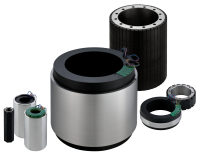
Kollmorgens motor program spænder fra standard servo motor til en FDA godkendt fødevareserie med et fuldt motor program i rustfrit stål og IP 69K foruden rammeløse motorer til robotter.
AKD serien for ProfiNet og EtherNet/IP
Hvor ofte anvendes der ikke forskellige PLC-fabrikater til lignende typer af maskinstyringer? I de fleste tilfælde er motion-opgaverne ens, hvilket gør, at man med stor fordel kan drage nytte af de samme servo-funktioner, og derfor kun skal ændre kommunikationen til PLC´en, når der skiftes fabrikat.
• ProfiNet til Siemens S7 PLC systemer
• EtherNet IP for Rockwell og Omron PLC systemer
• Funktionsblokke: Der giver et simpelt opsætning af drevparametre samt. drift fra PLC systemet
Det skal være nemt
Idéen bag AKD-serien er, at den skal være nem. Det vil sige, nem at konfigurere således, at du kan anvende tiden til det som du er bedst til – nemlig af skrive PLC-programmet/applikationen.
Tre step og motoren er klar til at køre
1) Motorkonfiguration:
Med Kollmorgens SFD encoder system læser drevet motor data via. en elektronisk navneplade. Hermed er der ingen opsætning af motordata i drevet, når de to enheder er forbundet.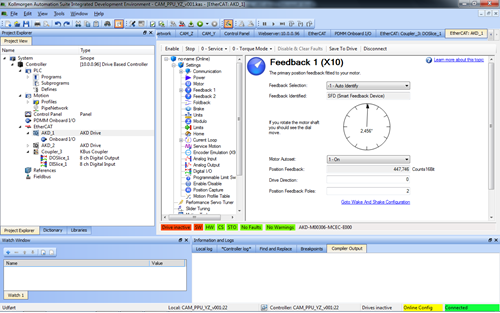
2) Skalering af enheder:
Al øvrig opsætning af drevet sker på et simpelt grafisk brugerniveau. Her vælgers, hvilken type transmission systemet har og de korrekte data angives. Hermed er SCALERING af units gennemført hurtigt og enkelt.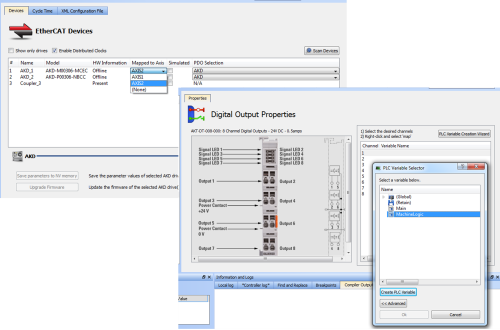
3: Autotuning af regulator
Den sidste funktion er at få tunet motoren til mekanikken. Også denne funktion afsluttes hurtigt via den indbyggede Autotuning funktion i softwaren.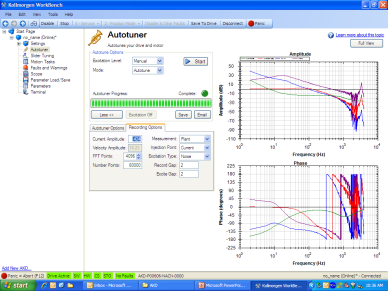
Relaterede produkter
IP69K motor i syrefast rustfri stål >
Stöber:
Gear til motor og drev >
Rollon:
Mekanik og XYZ føringssystem >
Katalog og data
AKD Profinet/Ethernet funktionsblok >
Download:
AKD drev specifikationer >
Manualer, tegninger og program >
eksempler samt "WorkBench" software til AKD